
HMS Industrial Networks: Continuer à avancer
Les problématiques de communication et de sécurité des fabricants de robots mobiles.

Dans les entrepôts, les hôpitaux et même dans les rues : les robots mobiles sont partout. Plus économiques, plus sûrs, plus faciles à obtenir et plus productifs que le personnel, leur succès est somme toute logique. Ils peuvent facilement être adaptés ou associés à d'autres machines. Ils collectent de nombreuses données en temps réel, ce qui facilite la mise en oeuvre de l'IIoT par les entreprises.
Mais pour être efficaces, les robots mobiles nécessitent des communications sûres et fiables. Cet article présente les principales problématiques de communication et de sécurité auxquelles les fabricants de robots mobiles sont confrontés, et propose un moyen simple de les résoudre pour que ces machines puissent continuer à avancer.
Que sont les robots mobiles ?
Avant toute chose, une définition s'impose.
Les robots mobiles transportent des matériaux d'un point A à un point B et se déclinent en deux types : les véhicules autoguidés et les robots mobiles autonomes. Les véhicules autoguidés s'appuient sur une infrastructure de guidage (réflecteurs filaires ou autres, bandes magnétiques) pour suivre des itinéraires prédéterminés. En cas d'obstacle sur la route d'un véhicule autoguidé, celui-ci est bloqué jusqu'au retrait de l'obstacle.
Les robots mobiles autonomes sont plus dynamiques. Ils naviguent à l'aide de cartes et utilisent les données de caméras, de capteurs intégrés ou de scanners laser pour analyser leur environnement et choisir l'itinéraire idéal. En cas d'obstacle sur la route d'un robot mobile autonome, celui-ci change d'itinéraire. Les robots mobiles autonomes ne dépendant pas d'une infrastructure de guidage, ils sont plus rapides à déployer et peuvent s'adapter aux changements logistiques.
Quelles sont les problématiques de communication et de sécurité des fabricants de robots mobiles ?
1. Établissement d'une communication sans fil
La première problématique des fabricants de robots mobiles est le choix de la technologie sans fil la plus adaptée. En général, il convient d'établir les critères, d'évaluer les normes, puis de choisir celle qui convient le mieux. Malheureusement, les fabricants de robots mobiles ne peuvent pas toujours procéder de la sorte, car souvent, ils ne savent pas où la machine sera située, ou ne disposent pas de toutes les informations sur l'application cible.
Parfois, le Bluetooth s'avère idéal, car il offre une connexion stable et non saturée, tandis que d'autres applications nécessiteront une connexion cellulaire sécurisée et à haut débit. Une solution utile pour les fabricants de robots mobiles consisterait à disposer d'une technologie réseau pouvant être facilement modifiée pour remplir des critères précis.
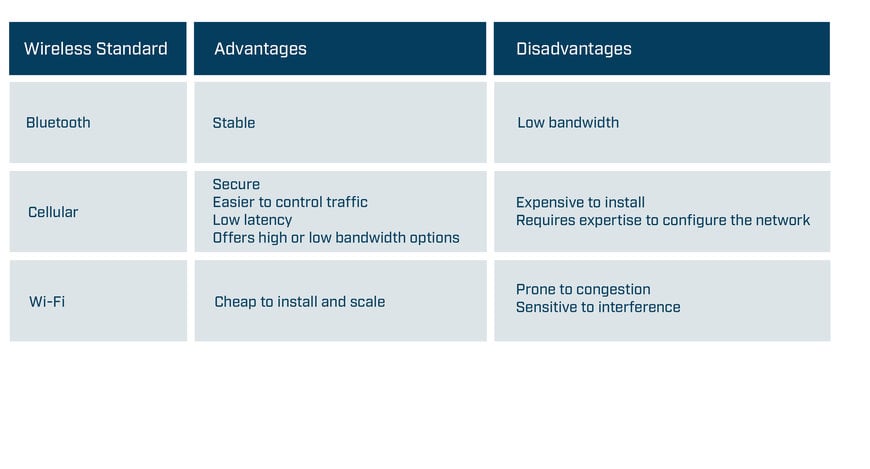
Avantages et inconvénients des différentes normes sans fil
La deuxième problématique est de s'assurer que l'installation fonctionne comme prévu. Avant d'installer une solution sans fil, une étude prédictive doit être effectuée à l'aide des plans du site pour s'assurer que les robots mobiles bénéficient d'une couverture réseau suffisante sur l'ensemble du site. L'étude du site doit permettre d'identifier l'emplacement optimal des points d'accès, le type d'antenne adéquat, l'angle d'antenne optimal et les moyens de limiter les interférences. Après l'installation, la conception doit être contrôlée à l'aide d'analyseurs sans fil, après quoi les points d'accès et l'antenne doivent être ajustés si nécessaire.
2. Connexion des robots mobiles aux réseaux industriels
Si les robots mobiles doivent communiquer avec les contrôleurs du site concerné, les premiers et les seconds utilisent souvent des protocoles industriels différents. Par exemple, un véhicule autoguidé peut utiliser CANopen tandis que le contrôleur utilisera PROFINET. De plus, les fabricants de robots mobiles sont susceptibles de vouloir utiliser le même modèle de véhicule autoguidé sur un site différent, où le contrôleur utilise un autre réseau industriel, EtherCAT par exemple.
Ces fabricants doivent aussi s'assurer que leurs robots mobiles disposent d'une capacité suffisante pour traiter le volume requis de données. Ce volume dépend de la taille et du type d'installation. Les grandes installations sont susceptibles d'utiliser davantage de données, car les algorithmes de routage doivent alors couvrir une plus grande superficie, davantage de véhicules et un nombre supérieur d'itinéraires potentiels. Les systèmes de navigation comme ceux de vision traitent des images. Ils nécessitent donc une puissance de traitement supérieure à celle requise dans les installations qui utilisent d'autres systèmes de navigation tels que des réflecteurs. Par conséquent, les fabricants de robots mobiles doivent résoudre les problématiques suivantes :
2. La technologie réseau doit pouvoir être facilement modifiée pour permettre au robot de communiquer sur le même réseau industriel que le contrôleur sans modifier la configuration matérielle.
3. Ils doivent s'assurer que la technologie réseau dispose d'une capacité et de fonctionnalités suffisantes pour traiter les données requises.
3. Création d'un système sûr
La création d'un système permettant aux robots mobiles de transporter des matériaux en toute sécurité est une tâche essentielle, mais difficile. Les fabricants de robots mobiles doivent créer un système qui tienne compte des structures, des personnes et des différents types de robots mobiles présents dans l'environnement. Ils doivent faire en sorte que les robots mobiles réagissent aux événements extérieurs, par exemple l'ouverture d'une porte de sécurité ou l'activation d'un bouton d'arrêt d'urgence, et que la solution réseau soit capable de traiter différents protocoles et interfaces de sécurité. Ils doivent tenir compte du fait que les robots mobiles autonomes se déplacent librement et gérer le risque de collisions en conséquence. La technologie employée dans les capteurs évolue constamment. Les fabricants de robots mobiles doivent donc suivre les dernières avancées pour garantir l'efficacité maximale de leurs produits.
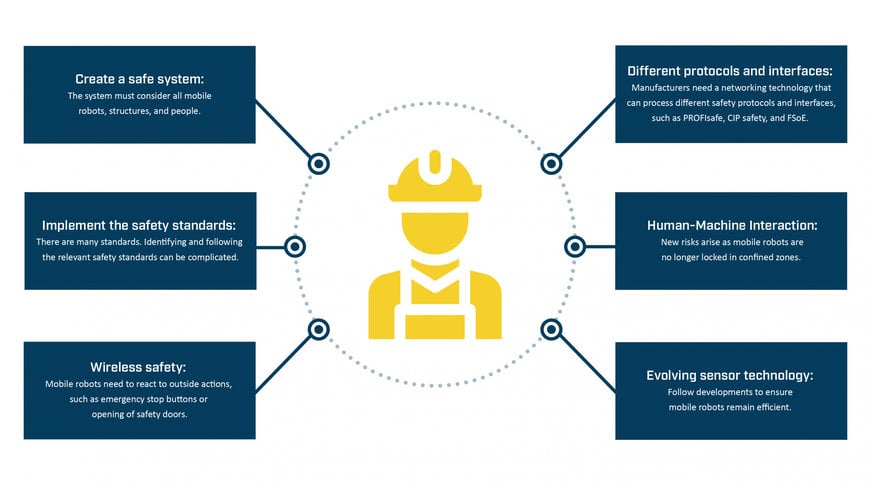
Présentation des problématiques de sécurité des fabricants de robots mobiles
Normes de sécurité
Les normes de sécurité fournissent des consignes sur la mise en oeuvre des composants de sécurité, la préparation de l'environnement et la maintenance des machines ou des équipements.
Si la conformité aux différentes normes de sécurité (ISO, DIN, CEI, ANSI, etc.) est le plus souvent volontaire, les constructeurs de machines de l'Union européenne doivent respecter les normes de sécurité des directives applicables aux machines. La directive 2006/42/CE sur les machines s'applique systématiquement aux fabricants de robots mobiles. La directive 2014/30/UE peut en outre s'appliquer, car elle réglemente la compatibilité électromagnétique des équipements. La directive 2006/42/CE sur les machines énonce les critères de conception et de fabrication des machines sûres commercialisées sur le marché européen. Les fabricants ne sont autorisés à apposer une étiquette CE et à livrer la machine à leurs clients que s'ils peuvent prouver dans la déclaration de conformité qu'ils ont satisfait aux exigences de la directive.
Si les autres normes de sécurité ne sont pas obligatoires, les fabricants doivent tout de même les respecter, car elles contribuent à satisfaire aux exigences de la directive 2006/42/CE sur les machines. Par exemple, les fabricants peuvent suivre les instructions de la norme ISO 12100 pour réduire les risques identifiés à un niveau résiduel acceptable. Ils peuvent utiliser la norme ISO 13849 ou CEI 62061 pour identifier le niveau de sécurité requis pour chaque risque et s'assurer que la fonction de sécurité correspondante remplit les critères définis. Les fabricants de robots mobiles décident de la façon dont ils atteignent un certain niveau de sécurité. Par exemple, ils peuvent diminuer la vitesse du robot mobile pour ramener le risque de collision et la gravité des blessures à un niveau acceptable. Ils peuvent aussi faire en sorte que les robots mobiles n'évoluent que dans des zones interdites d'accès aux humains (définies en tant que zones confinées dans la norme ISO 3691-4).
L'identification des normes adéquates et le respect des critères sont le meilleur moyen pour les fabricants de robots mobiles de créer un système sûr. Mais comme le suggère cette synthèse, l'opération est complexe et chronophage.
4. Mise en oeuvre de communications CAN fiables
Norme fiable et facile à mettre en oeuvre datant des années 1980, la technologie de communication CAN continue de gagner en popularité, principalement en raison de son utilisation dans divers secteurs en plein essor comme l'électromobilité et les systèmes de stockage d'énergie en batterie. CAN est simple, peu énergivore et économique. Tous les équipements du réseau peuvent accéder à l'ensemble des informations, et la norme est ouverte, ce qui signifie que les utilisateurs peuvent adapter et étendre les messages selon leurs besoins.
Pour les fabricants de robots mobiles, l'établissement d'une connexion CAN devient encore plus essentiel, car elle leur permet de surveiller les batteries lithium-ion de plus en plus utilisées dans les systèmes d'entraînement des robots, qu'il s'agisse de systèmes modernisés ou d'installations nouvelles. Les fabricants de robots mobiles doivent procéder comme suit :
2. Protéger les systèmes contre les interférences électromagnétiques, celles-ci pouvant détruire les composants électroniques d'un système. Le risque d'interférences électromagnétiques est important dans les modernisations, car l'ajout de nouveaux composants (par exemple des batteries à côté du câble de communication) introduit des perturbations électromagnétiques à haute fréquence.
5. Accès à distance aux robots mobiles
La possibilité d'accéder à distance au système de commande d'une machine peut permettre aux fournisseurs ou aux concepteurs de robots mobiles de dépanner et de résoudre la plupart des problèmes sans devoir se déplacer sur site.
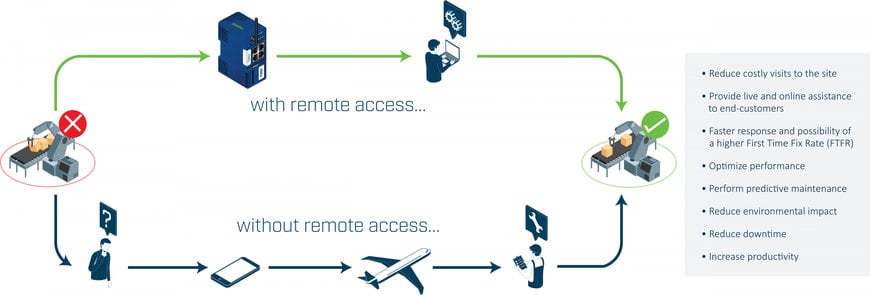
Avantages de l'accès à distance
La difficulté réside dans la création d'une solution d'accès à distance tenant compte à la fois des besoins du service informatique et de ceux du concepteur ou du fournisseur.
Le service informatique veut s'assurer que le réseau demeure sécurisé, fiable et intègre. C'est pourquoi la solution d'accès à distance doit inclure les mesures de sécurité suivantes :
• Séparer le trafic correspondant du reste du réseau.
• Crypter et protéger tout le trafic pour garantir sa confidentialité et son intégrité.
• S'assurer que les fournisseurs respectent ou soient certifiés conformes aux normes de sécurité pertinentes comme ISO 27001.
• S'assurer que les fournisseurs effectuent régulièrement des audits de sécurité.
Le concepteur ou le fournisseur veut un système simple d'utilisation et fiable. Les utilisateurs doivent pouvoir se connecter facilement aux robots mobiles et accéder aux informations requises. Si l'installation est susceptible de changer, le nombre de robots doit pouvoir être adapté facilement selon les besoins. Si les robots mobiles sont déployés dans un autre pays que celui du fournisseurs ou du concepteur, l'infrastructure réseau doit disposer d'une couverture et d'une redondance suffisantes pour garantir une disponibilité dans le monde entier.
Conclusion
Nous l'avons vu, les fabricants de robots mobiles doivent résoudre de nombreuses problématiques de communication et de sécurité. Ils doivent établir une connexion sans fil, transmettre des données sur différents réseaux, garantir la sécurité, se connecter aux systèmes CAN et accéder aux robots à distance de façon sécurisée. Et pour compliquer le tout, chaque installation doit être réévaluée et adaptée pour répondre aux exigences du site.
Bonnes pratiques de mise en oeuvre des communications avec les robots mobiles
Les fabricants de robots mobiles sont rarement des spécialistes des communications ou de la sécurité. Le développement en interne de la technologie de communication requise peut donc nécessiter un temps et un budget considérables. L'utilisation de solutions de communication tierces spécialisées résout les problématiques de communication et procure d'autres avantages.
Avec leur conception modulaire, les solutions de communication modernes permettent aux fabricants de robots mobiles de troquer un produit réseau conçu pour une seule norme ou un seul protocole contre un produit conçu pour une autre norme ou un autre protocole sans aucun impact sur le reste de la machine. Par exemple, le Bluetooth peut être la norme sans fil la plus appropriée dans une installation, et le Wi-Fi offrir une meilleure couverture dans une autre. De la même façon, un site peut utiliser les protocoles PROFINET et PROFIsafe, tandis qu'un autre utilisera des protocoles industriels et de sécurité différents. Dans les deux cas, les fabricants de robots mobiles peuvent utiliser des produits de communication pour modifier la technologie réseau afin de répondre aux exigences locales sans modifier la configuration matérielle.
Auteurs :
Mark Crossley, Daniel Heinzler, Fredrik Brynolf, Thomas Carlsson
HMS Networks
Spécialiste des communications industrielles basé en Suède, HMS Networks propose différentes solutions pour les communications des véhicules autoguidés. Pour plus d'informations, consultez la page www.hms-networks.com/agv.
