
www.industrieweb.fr
22
'20
Written on Modified on
Guide de conception pour l’alimentation des drones captifs
Applications des drones captifs.
Par Mark Patrick, Mouser Electronics
Le marché des drones et aéronefs sans pilote (UAV) captifs se développe à un rythme soutenu. On prévoit une croissance de 61 % sur 12 mois en 2020. Cette croissance est due au nombre croissant d’applications et d’utilisations possibles d’une plate-forme aérienne permanente. Contrairement aux modèles non captifs, c’est-à-dire sans fil, dont l’autonomie est limitée, les drones captifs ne doivent pas transporter leur source d’énergie principale, ce qui augmente leur charge utile. Plus endurants, ils peuvent voler jusqu’à 24 heures d’affilée, jusqu’à 200 m d’altitude et dans la plupart des conditions météorologiques. Ils trouvent ainsi leur utilité dans divers domaines tels que la sécurité traditionnelle, la collecte de renseignements et la surveillance.
Grâce à leur capacité à effectuer des vols prolongés, ils peuvent être utilisés pour constituer des réseaux de télécommunications d’urgence lors de crises humanitaires, surveiller les opérations de lutte contre les incendies dans un grand complexe industriel ou encore filmer de grandes manifestations sportives en extérieur. Bien sûr, les défis techniques augmentent à mesure que les drones captifs trouvent de nouvelles applications. Plus l’on cherche à intégrer de fonctionnalités dans les drones, plus on augmente la charge. Augmenter la hauteur opérationnelle apporte des avantages, mais augmente aussi la force de traînée exercée sur le câble. De plus, le fait de prolonger le temps de vol requiert de renforcer la surveillance et de prévoir une source d’alimentation de secours ainsi que des dispositifs de sécurité comme un parachute.
Défis techniques liés à l’alimentation des drones captifs
La propulsion de drones captifs pose quelques difficultés techniques. Les drones ont besoin d’énergie pour les moteurs d’entraînement du rotor, l’électronique de commande et les moteurs destinés à supporter la charge utile, qui représentent à eux seuls la plus grande partie du coût énergétique d’un drone. En outre, la résistance électrique de longs câbles entraîne une perte en ligne d’électricité. Pour atteindre une charge utile maximale, le poids de traînée du câble doit être réduit à un minimum, ce qui impose des contraintes sur l’épaisseur du conducteur. Or, un conducteur plus mince augmente la résistance électrique du câble, laquelle s’accroit exponentiellement à mesure que l’on augmente la hauteur opérationnelle de l’appareil.
De ce fait, la seule méthode viable pour satisfaire les besoins en énergie d’un drone en limitant la déperdition d’énergie consiste à transmettre du courant à haute tension par le câble. La conversion de puissance s’effectue alors dans le drone proprement dit. Le poids étant une contrainte importante, les composants du dispositif de conversion de puissance doivent être les plus légers possibles. Une tension continue élevée réduit le courant circulant dans le câble (I = P/V). Cela permet d’utiliser des conducteurs de petit diamètre tout en réduisant les pertes I2R. L’industrie semble aujourd’hui s’orienter vers cette solution en transmettant jusqu’à 400 V CC par le câble vers un ou plusieurs convertisseurs CC-CC embarqués pour alimenter les moteurs de rotor et les circuits d’application du drone.
Choix d’un convertisseur CC-CC avec entrée à haute tension
De nombreux fabricants proposent toute une gamme de convertisseurs CC-CC. Le choix se réduit toutefois considérablement lorsqu’il s’agit de trouver un convertisseur acceptant une entrée de tension aussi élevée que 400 V CC. Le convertisseur doit également avoir un haut rapport de conversion afin d’obtenir une tension de sortie d’environ 48 V CC.
Mais la perle rare existe. Vicor propose par exemple sa série BCM6123 de modules convertisseurs de bus haute tension.
La série BCM6123 présente un rapport de conversion fixe – appelé facteur K – et un rendement très élevé – de généralement 98 %. Le modèleBCM6123xD1E5135T01, par exemple, accepte une tension d’entrée de 400 VCC, avec un facteur K de 1/8 et une puissance délivrable de 1750 Watts. Les convertisseurs à rapport de conversion fixe, également appelés convertisseurs de bus, n’incorporent généralement pas de régulation de la tension de sortie, bien que cela puisse être réalisé par d’autres convertisseurs CC-CC placés en aval si nécessaire. En l’absence de composants de régulation de tension, les convertisseurs de bus peuvent présenter un très haut rendement et des densités de puissance plus élevées. Avec moins de chaleur perdue, la gestion de la température s’en trouve grandement simplifiée, ce qui permet de réduire encore le poids total de l’appareil.
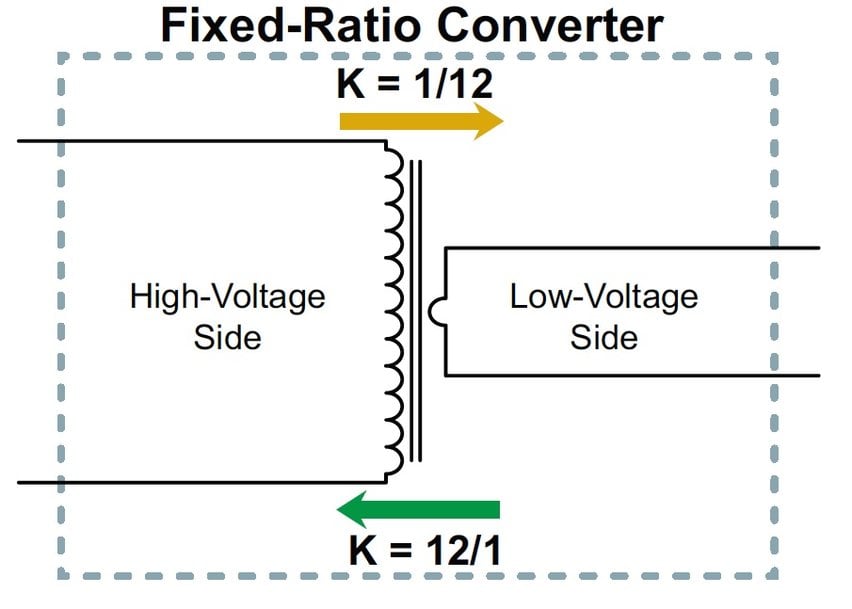
Un convertisseur de bus peut augmenter et réduire une tension d’entrée et convient à la conversion de puissance bidirectionnelle (Source: Vicor)
La figure1 illustre un convertisseur de bus isolé avec un facteur K de 1/12. Les convertisseurs de la série BCM sont conçus de façon à être utilisés pour augmenter ou réduire la tension. Notons toutefois que dans le cas où il serait nécessaire d’opérer de façon inverse, c’est-à-dire de créer une haute tension à partir d’une source basse tension, le convertisseur doit d’abord être démarré en mode direct normal. Dans cet exemple, on obtient avec 400 VCC en entrée une tension de sortie de 33 VCC. De même, une entrée de 33 VCC côté basse tension produit 400 VCC en sortie. Les convertisseurs de bus de la série Vicor BCM peuvent être configurés en parallèle pour obtenir une puissance de sortie plus élevée, ou en série pour fournir une tension de sortie plus élevée.
Tous les convertisseurs de la série BCM s’appuient sur la topologie de convertisseur d’amplitude sinusoïdale (SAC) pour offrir un haut rendement de conversion. La plupart des topologies de convertisseur CC-CC utilisent le cycle de service du circuit de commande de commutation à modulation de largeur d’impulsion (PWM) du convertisseur pour contrôler la sortie d’alimentation secondaire. Afin de limiter à un minimum les pertes de commutation, la fréquence de PWM ne dépasse pas quelques centaines de kHz.
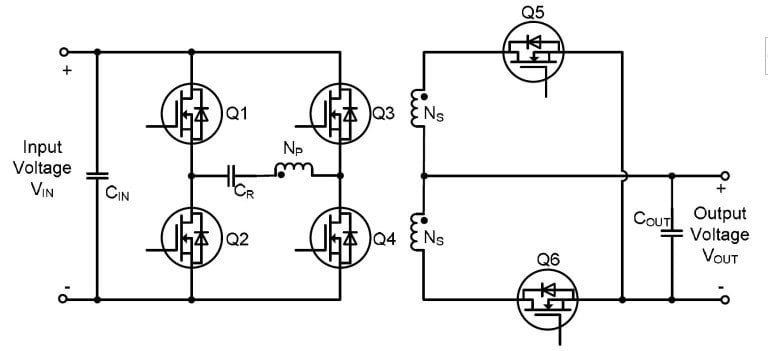
Circuit simplifié d’un convertisseur d’amplitude sinusoïdale (Source: Vicor)
SAC est une topologie résonante basée sur un transformateur. Le convertisseur de commutation fonctionne à la fréquence de résonance fixe du circuit LC équivalent du côté primaire. Réaliser la commutation aux points de passage par zéro élimine les pertes de puissance avec les dispositifs de commutation, ce qui améliore considérablement le rendement de conversion et réduit la génération d’harmoniques d’ordre élevé. Contrairement à la variation du cycle de service PWM qui utilise un signal de commande à onde carrée, un convertisseur SAC utilise une fréquence beaucoup plus élevée, généralement de plusieurs MHz, et ajuste l’amplitude du signal de commande pour s’adapter aux charges de sortie plus élevées. L’utilisation d’une fréquence de commutation plus élevée contribue en outre à réduire la taille du transformateur – et donc son poids.
Effets de la ligne de transmission
L’étude des propriétés du circuit du câble de transmission fait partie du processus de conception. Il convient en effet de tenir compte de facteurs essentiels tels que la résistance, la capacité électrique et l’inductance par unité de longueur.
Les câbles de faible longueur se comportent comme des circuits RLC, tandis que les câbles longs agissent plutôt comme des lignes de transmissions avec des attributs de circuit RLC distribués. Une simulation du câble peut aider à gérer les effets de la ligne de transmission, en particulier en ce qui concerne les surtensions d’entrée lors de la mise en marche initiale. Une terminaison correcte du câble d’attache avec un filtre de sortie peut atténuer l’impact des surtensions d’entrée sur le drone. De manière générale, si le temps de montée d’une pointe de puissance est plus de dix fois supérieur au retard de ligne, on considère que le le câble est court.
Exemple pratique d’alimentation d’un drone
La figure 3 ci-dessous présente un schéma fonctionnel simplifié d’une solution de transmission de CC à haute tension pour un drone. L’alimentation de 400 V CC du drone utilise quatre convertisseurs de bus à rapport de conversion fixe BCM6123 pour isoler le bus et l’alimenter avec un courant de 48 V CC. La tension du bus alimente directement les moteurs du rotor. Deux convertisseurs CC-CC DCM convertissent la tension du bus de 48 V CC en alimentations régulées distinctes de 12 V CC et 24 V CC pour alimenter l’électronique de commande et de télémétrie et la caméra vidéo du drone.
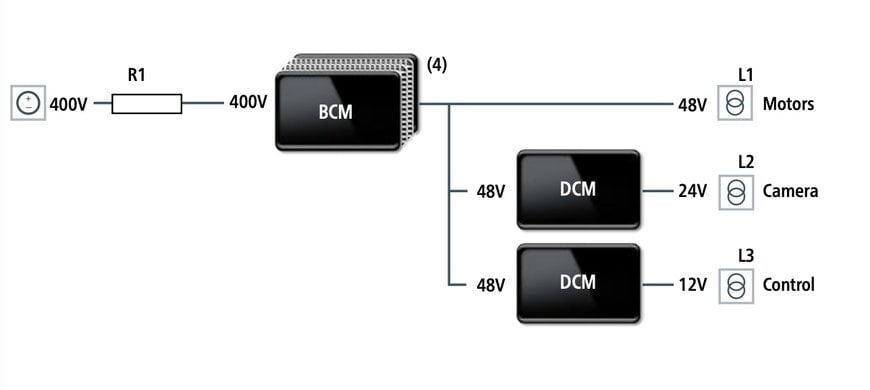
Exemple d’application pour alimenter un drone par un câble de 400 VCC (Source: Vicor)
Cette configuration a permis d’obtenir une alimentation embarquée de 5 kW avec une densité de puissance de 2 750 W/in3 pour une convertisseur de puissance (4 x BCM et 2 x DCM) d’un poids total de 222 g seulement.
Grâce à sa capacité de fonctionnement bidirectionnel, le convertisseur BCM peut également alimenter un drone depuis le sol. Une alimentation sur batterie de 48 VCC fournira les 400 VCC nécessaires pour alimenter le câble.
Conclusion
Les convertisseurs de bus à haute tension et à rapport de conversion fixe sont un moyen très efficace de fournir l’énergie nécessaire à un drone captif. Grâce à des exigences minimales en matière de dissipateurs de chaleur, leur conception peu encombrante et leur faible poids, ils permettent aux ingénieurs de conception de drones de maximiser la capacité de charge utile et de réduire le poids de traînée du câble. Enfin, le convertisseur d’amplitude sinusoïdale émet peut d’interférences électromagnétiques et nécessite ainsi moins de composants de filtrage volumineux supplémentaires. Ce gain de place permet d’augmenter encore les capacités de charge utile des drones.
www.mouser.com
About the Author

Mark Patrick
Technical Marketing Manager EMEA Marketing
As Mouser Electronics’ Technical Marketing Manager for EMEA, Mark Patrick is responsible for the creation and circulation of technical content within the region — content that is key to Mouser’s strategy to support, inform and inspire its engineering audience.
Prior to leading the Technical Marketing team, Patrick was part of the EMEA Supplier Marketing team and played a vital role in establishing and developing relationships with key manufacturing partners.
In addition to a variety of technical and marketing positions, Patrick’s previous roles include eight years at Texas Instruments in Applications Support and Technical Sales.
A “hands-on” engineer at heart, with a passion for vintage synthesizers and motorcycles, he thinks nothing of carrying out repairs on either. Patrick holds a first class Honours Degree in Electronics Engineering from Coventry University.
